AM-GYROの紹介
- 2軸ジャイロ(角速度)センサー(InvenSense社のIDG-650 / IXZ-650)を利用した超小型モジュール
- 出力信号にローパスフィルタ(Low Pass Filter)(約2kHz)を具現
- 3.3Vの電源だけを印加すると、追加的な回路なしに角速度を出力
- ゲームや低い速度の出力のために、軸当たりに2個に分離されて出力
- 内蔵されたアンプとローパスフィルタ(Low Pass Filter)
- バイアス補正のための自動ゼロ点補正機能
- 内蔵温度センサー
- 広い周波数範囲に対し高い振動を排除
- MEMSデザインによる高い軸間分離
- 3Vの単一電圧動作
- 温度や湿度抵抗に対する密封
- 10,000g ショック耐性
- 最も小さいデュアル軸のジャイロパッケージ( 4mm x 5mm x 1.2mm )チップを使用
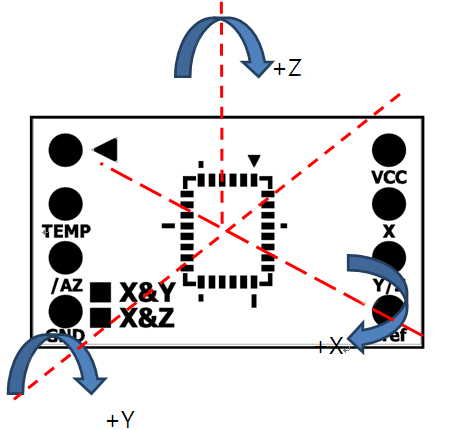
構成図
外観
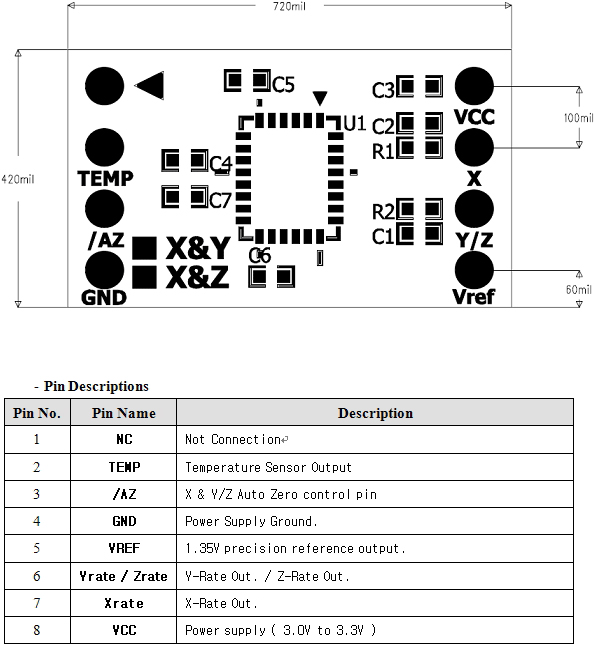
Note :
- 感度は0.5 mV/°/s
- 感度のフルスケールは±2000 °/s
- Xrate及びYrate/Zrateの出力電圧範囲は基準電圧(出荷時:1.35V ± 1000 mV )です。
- 以下のアドレスリンクはチップ製造社及びデータシートです。
http://www.invensense.com/
http://www.invensense.com/mems/gyro/documents/PS-IDG-0650B-00-05.pdf
http://www.invensense.com/mems/gyro/documents/PS-IXZ-0650B-00-03.pdf
使用方法
1.1 ハードウェアの接続
VCCとGNDに信号を3.3VとGNDを印加して、X, Yの出力信号をADCの入力にそれぞれ接続します。角速度モジュールはデジタルコントロールピンなしに、電源だけを印加すると角速度が電圧形態に出力されるので、これをADCを利用してデジタルに変換します。ATMega128の場合、FポートがA/Dコンバーターです。
1.2 2軸角速度センサーの動作方法
センサーの出力をADCで値をコンバーティングすると、該当の軸へ加わる角速度を知ることができます。角速度を時間に対して積分すると、各軸に該当する累積された角を知ることができます。しかし、ジャイロだけでは正確に絶対角度を調べることはできません。累積誤差が発生するためでありますが、その原因はセンサーに入る電源ノイズ、データに入ってくるノイズ、ADCをしながら生じる量子化ノイズ、そして、基準電圧の変更によるノイズなどがある場合があります。
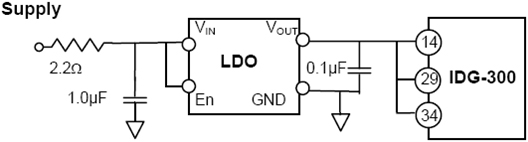
センサーに入る電源ノイズは、以下の図のように設計すると減らせることができます。以下においてLDOが低周波ノイズを減殺させます。
基準電圧の変更によるノイズは製造工程上に生じる問題であり、如何に0点にしたとしても、事実、使用時に正確な値を捉えることは難しいです。この場合、offset errorが生じることがあります。チップがレーザーでカットされて製作されるので、製作当時は非常に正確であるが、運送過程、機械的なストレス、温度などによって、少しずつエラーが発生する場合があります。
A/Dコンバーターに関連する内容は、弊社NEWTCのホームページの、講座 > AVR講座のADC講座及びサポート資料室の例題を参考してください。
1.3 AVRを利用した加速度/角速度テストプログラム
例題プログラムは3軸加速度センサーで使用したプログラムと同様のものを使用します。UART通信の設定は、基本COM1、115,200bps、8bit、 Parity Noneになっています。Windowsプログラムと一緒にATMEGA128を利用して、ADC結果値をシリアルで転送するAVR用Cソースも一緒に提供されます。それぞれX, Y, Zの値を受けてA/Dするようになっています。この値がAVRのUARTポート0番を通じてPCへ入ると、 PCではこのパケットを受けて分析し、各X, Y, Zの値を計算した後、各値を使用して画面で処理するようになります。
本プログラムは3軸加速度センサーにおいて使用されるように製作され、 X, Y, Zの値を転送しますが、当ジャイロセンサーは2軸であるため、X, Yのみを使用するようになります。ジャイロセンサーをテストする時は、 3軸加速度センサーテスト用ウィンドウプログラムの、速度チェックボックスを選択して使用すると便利です。
●商品情報