●商品の特徴
マイクロステップドライバー駆動モジュールです。
モータに流れる電流量の調整が可能です。
ステッピングモータを2個駆動することができます。
ステッピングモータの正転と逆転の切り替えやモータステップの変更をコントロールします。
※メインボードとの接続には、別売の10ピン接続ケーブルが必要です。
マニュアルのダウンロードはこちら
- マイクロステップ・ドライバの駆動ボード(ステッピングモーターを精密に制御可能)
- ステッピングモーターを2個駆動
- 10ピンケーブルと12V電源供給コネクタを接続
- モーターへ流れる電流量を調整できる
- Enableピンにしてモーター駆動部の動作制御
構成図
●AM-MS2 ステッピングモーター駆動モジュールのハードウェア
ハードウェア構成図

使用方法
●AM-MS2 ステッピングモーター駆動モジュールの使用方法
1.1 ハードウェアの接続
1.1.1 Enable信号
Enable信号は、ステッピングモーターの駆動部を作動させたり、作動させない場合に使用する。Active Highになっており、モーターを常に作動させるためにはVCCへ接続すればいい。Sleepモードで使用するにはポート出力へ接続する。0を出力する場合、モーターにトルクがなくなる。
1.1.2 ステップモード(Step Mode)[1:0] 信号
マイクロステップのステップモードを設定するピンである。基本設定は Half Stepに設定されている。

必要に応じてポートに接続したり、モードを1種類にして使用する場合には、該当するピンにVCC、またはGND信号を印加すればいい。何も接続しないとHalf Step Modeで動作する。
1.1.3 左側モーター/右側モーターのDIR
左側モーターと右側モーターの方向を決める。DIRピンがGNDへ接続される場合、モーターが時計方向(CW)に回転し、VCCへ接続される場合には時計反対方向(CCW)に回転する。モーター2個で移動ロボットを構成する場合、左側モーターは時計反対方向に、右側モーターは時計方向に作動させることで前に進むことができる。該当のピンにVCC、またはGND信号を印加するか、ポート出力へ接続する。
1.1.4 左側モーター/右側モーターのCLK
左側モーターと右側モーターの回転速度を決める。CLKを速くした場合、モーターが速い速度で回転し、遅くした場合は、遅い速度で回転する。このピンはマイクロコントローラのポートに接続して、マイクロコントローラからCLKを入れることができるようにする。
クロック当たりのモーターの回転角度は、マイクロステップモードによって異なる。
1.1.5 詳細なステッピングモーターの理解
ステッピングモーターを駆動するためには、ステッピングモーターの基本的な構造と作動方法を理解し、駆動するための信号をソフトウェア的に作らなければならない。
弊社ホームページ(http://www.newtc.co.kr)にATMega128において具現された例題ファイルがありますので、ご参考ください。
基本的な構造と動作方法、ソフトウェア的な具現方法は、ホームページから提供する“ライントレーサー講座 - 2 モーター駆動部”をご参考ください。

<KD-128PRO” を使用してステッピングモーター駆動モジュールを使用する写真>
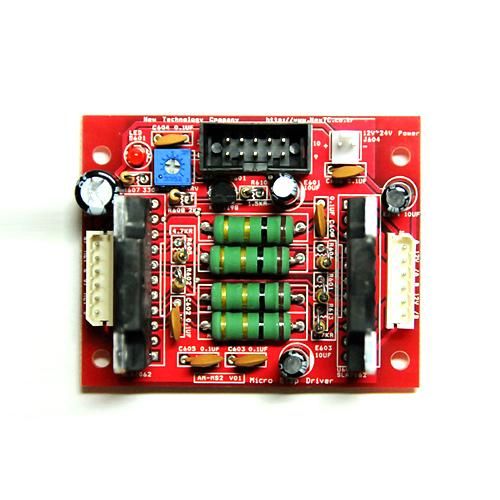
製品の使用イメージ
AM-MS2(ステッピングモータークロック駆動モジュール)の写真

●商品情報